Balance Control
Balance control is what keeps humanoid robots upright when the world pushes back. It’s how they respond to slips, bumps, uneven terrain, or shifting loads — by recalculating movement in real time, across the whole body.
Bipedal locomotion is hard, and balance explains why. Traditional methods use feedback loops based on Zero Moment Point or center-of-mass tracking. But modern systems are moving toward learned, general-purpose policies that adapt to uncertainty, noise, and delay.
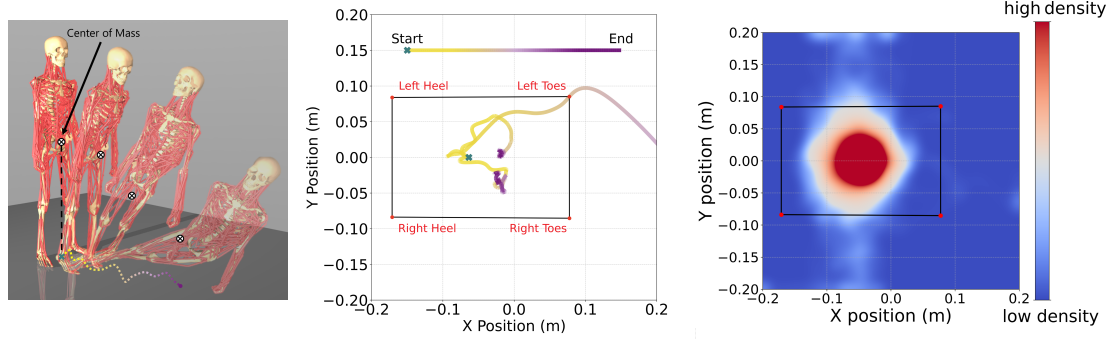
In simulation, even small changes in center of mass can mean the difference between recovery and collapse — highlighting the precision required for standing, let alone walking. Source: Bipedal Balance Control with Whole-body Musculoskeletal Standing and Falling Simulations