Full-Body Motion
To operate in human environments, humanoid robots must move as unified bodies, not just isolated limbs. Whether reaching while walking, catching a stumble, or using multiple contacts, full-body motion demands synchronized control across legs, arms, torso, and even gaze.
This coordination requires frameworks that account for kinematics, dynamics, and real-time feedback. Leading approaches combine momentum-based planning, contact-aware optimization, and neural warm-starts to speed up response without sacrificing stability.
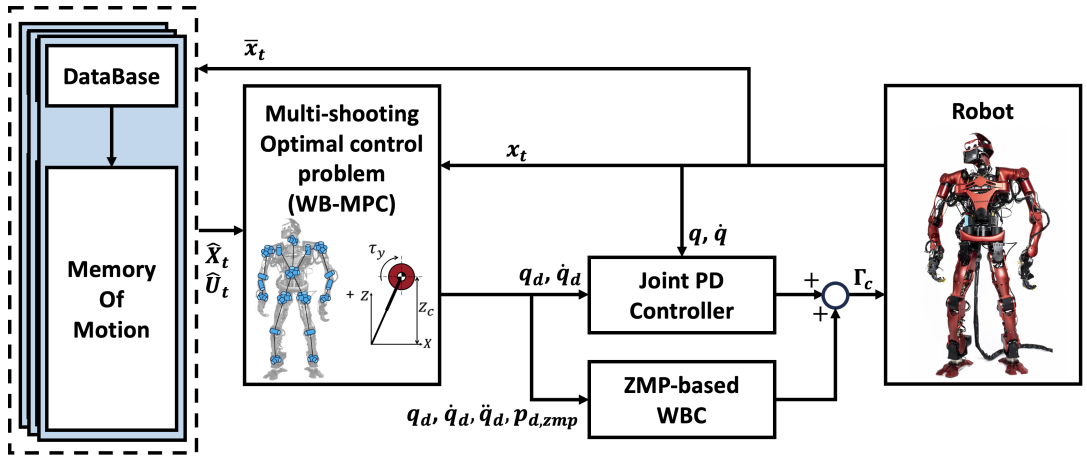
A real-time controller from Seoul National University uses predictive models and learned warm-starts to plan coordinated whole-body motion — balancing speed and stability in dynamic tasks. Source: Real-time Whole-body Model Predictive Control for Bipedal Locomotion with a Novel Kino-dynamic Model and Warm-start Method