Locomotion Control
Locomotion control enables humanoid robots to walk, balance, and adjust in real time — across flat surfaces, stairs, or uneven terrain. It combines trajectory planning, inverse kinematics, and feedback control to generate stable, coordinated movement.
A key technique is Model Predictive Control (MPC), which simulates future states to plan center-of-mass shifts, adapt footsteps, and recover from slips. MPC allows robots to anticipate rather than react, adjusting gait dynamically as the environment changes.
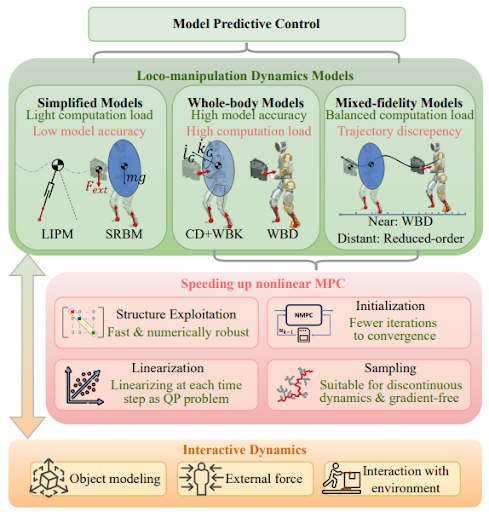
Different MPC models — simplified, nonlinear, and full-body — offer tradeoffs between computational cost and control fidelity. Source: Humanoid Locomotion and Manipulation: Current Progress and Challenges in Control, Planning, and Learning
Locomotion isn’t a set of preprogrammed moves. It’s a continuous, predictive process where planning, sensing, and control operate in tight synchrony.