Predictive Models
Predictive models give humanoids foresight. Rather than reacting frame by frame, they estimate how bodies, objects, and environments will evolve. It’s critical for balance, manipulation, and real-time planning. From milliseconds of fall recovery to minutes of task sequencing, prediction shapes control at every scale.
A key trend is internal world models that simulate future outcomes without constant real-world resets. Transformers, diffusion policies, and hybrid physics-learning frameworks are pushing robotic foresight beyond reactive behavior.
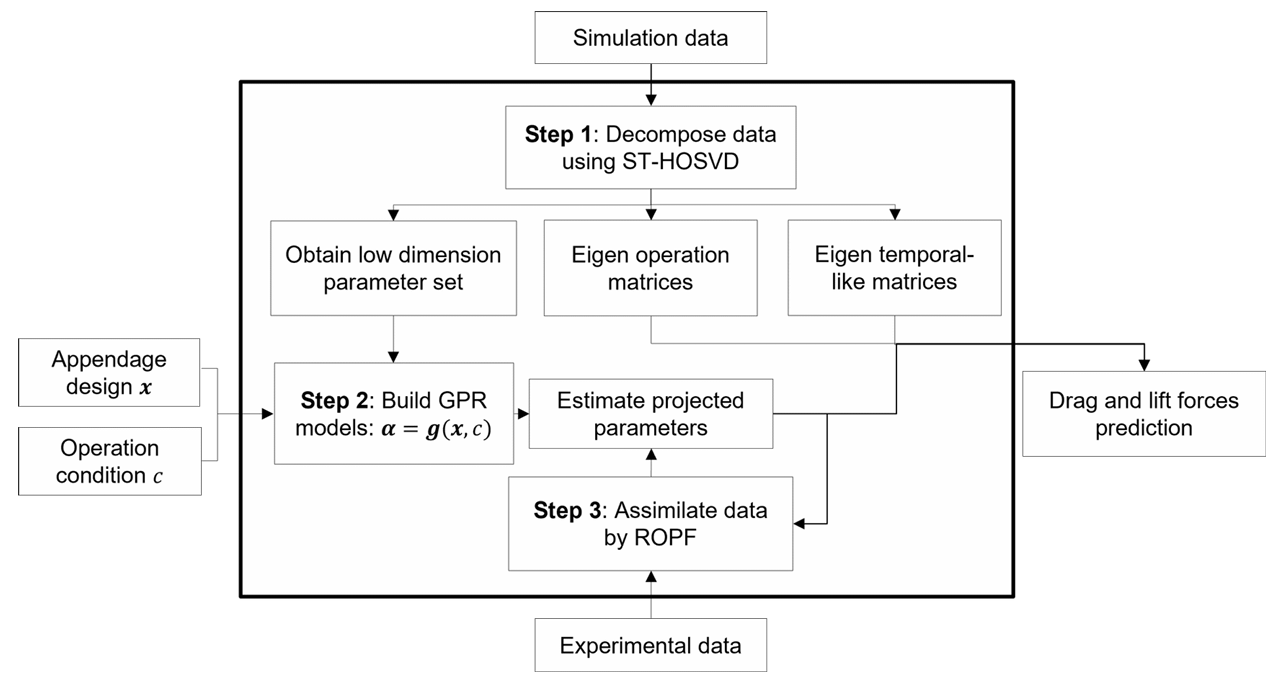
One example models how robotic legs interact with granular terrain. Using dimensionality reduction and particle filtering, it predicts dynamic forces more accurately than traditional simulators. Source: Data-Driven Prediction of Dynamic Interactions Between Robot Appendage and Granular Material
Predictive models are becoming part of the control loop — running onboard, learning online, and enabling humanoids to act before the environment changes.