Reinforcement Learning
Reinforcement learning (RL) enables robots to develop behaviors by interacting with the environment, receiving feedback, and optimizing their actions over time. In humanoids, RL powers skills like balancing, grasping, locomotion, and fall recovery.
Unlike scripted control, RL thrives in environments with uncertainty: walking on ice, lifting unfamiliar objects, or navigating cluttered rooms. Agents learn what works through repetition, gradually improving policies to maximize long-term success.
Recent trends include sim-to-real transfer (training in simulation, then deploying in hardware), offline RL (learning from logged data), and hierarchical RL (stacking learned behaviors). These techniques aim to reduce training time and improve real-world generalization.
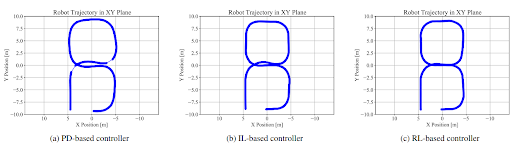
A robot trained with RL tracks a moving pedestrian more smoothly than those using traditional or imitation-based control. While this example focuses on navigation, similar RL methods underpin locomotion, balance, and object interaction in humanoid systems. Source: Human-Robot Navigation using Event-based Cameras and Reinforcement Learning
To scale, RL is increasingly blended with imitation learning, prior knowledge, and foundation models.