Zero Moment Point (ZMP)
ZMP is the location on the ground where the combined tipping effects of gravity and inertia cancel out. As long as this point stays within a robot’s support area, the motion remains dynamically stable.
ZMP-based planning underpins model-driven walking control — stabilizing steps, shifting weight safely, and responding to disturbances in real time.
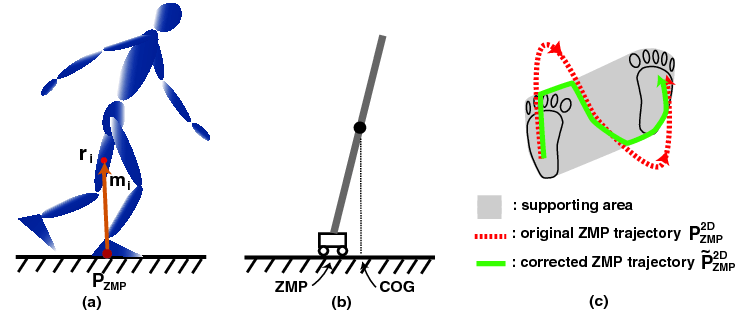
ZMP defines where a robot’s support forces cancel tipping. Keeping it within the foot area ensures stability during locomotion. Source: A Physically-Based Motion Retargeting Filter
While newer methods blend ZMP with learned dynamics, it remains a core tool for making humanoid motion stable and predictable.