

KinetIQ Ascend: Toward 100% Reliable Manipulation and Superhuman Speed
Overview
Currently, imitation learning is the primary way to teach robots manipulation skills. This approach works well to create impressive demos, but it doesn’t create robots that can outperform people or operate in real-world environments.
In a new technical deep dive, we revealed how it uses reinforcement learning (RL) to improve its robots’ performance through experience instead of just relying on human demos. Our approach, KinetIQ Ascend, extends KinetIQ, the AI framework behind our robots, with the ability to learn from trial and error. We believe this is the first published demonstration of end-to-end, vision-based RL running on production humanoid manipulation systems in real-world deployment conditions.
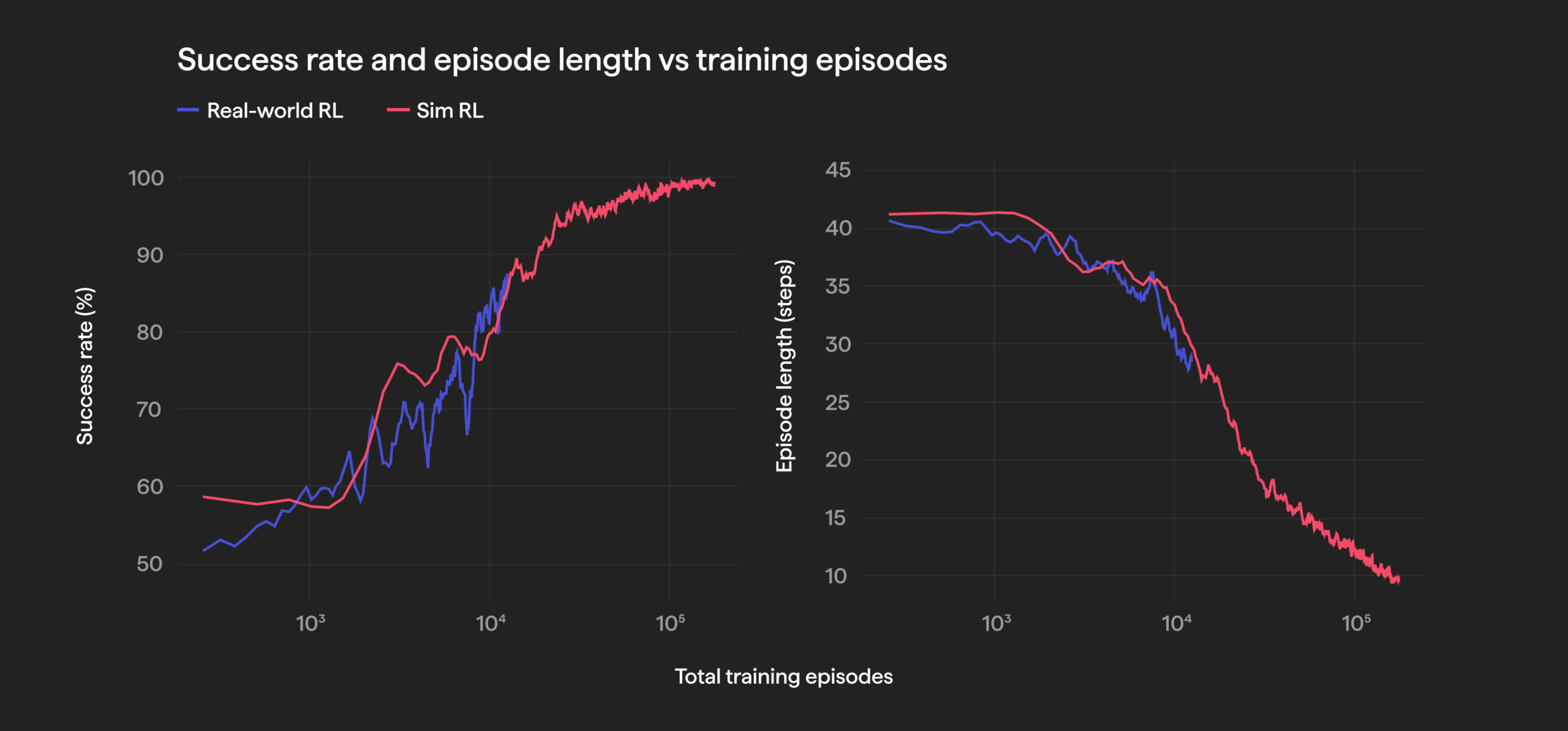
One of the key findings is that robot performance improves in a predictable way as more robot training time is added. It’s similar to how large language models improve as more compute and data become available. The observed scaling trend, supported by simulation experiments, suggests that our method scales all the way to 100% reliability.
Real-world impact
The results were demonstrated on several industrial tasks:
- In a machine-feeding application (a robot picks steel bearing rings from a bin and places them onto a conveyor) RL increased throughput by 42%. The robot performed the task at 1.5x the speed of the human demos it originally learned from.
- In a second task involving picking items from a cluttered tote and handing them to a person, throughput increased by 85%, and success rates improved from 80% to 98%.
- In a third task involving bimanual tote handling, where the robot lifts a tote off a table using both arms, throughput more than doubled and success rate rose from 78% to 99% — a roughly twentyfold reduction in failures. The robots achieved these improvements after only a few days of learning.

The company also uncovered two findings that exceeded expectations. First, improving only the most difficult part of a workflow can improve the performance of the entire task. Second, the robots appeared to generalize what they learned. After training on a single object type, performance improved on other objects the robots had never seen during training.
The bigger vision: a capability factory
KinetIQ Ascend, our real-world RL method, shows a new way of developing robot capabilities. Instead of spending months collecting data and manually tuning every new skill, we can start with a basic behavior and allow RL to refine it into a deployment-ready capability — a process we describe as building a ‘capability factory’, a system designed to rapidly create, improve, and scale robot skills across industrial environments
The long-term vision goes even further. Because the same training framework can run on deployed robots, every robot could eventually become part of the learning system. It means that fleets would continuously improve creating a feedback loop: better robots generate better data, leading to even better robots over time.
When a supervisor steps in to correct or assist a robot on-site, that intervention automatically becomes a training signal — meaning routine operation turns into continuous improvement, without any additional data collection effort.
Why it matters for the industry
The humanoid race is becoming a question of scale. The key challenge is to enable robots to perform thousands of tasks every day with speed, reliability, and consistency. Our research suggests that real-world RL may be one of the technologies that helps address that challenge.
If we allow robots to improve themselves after initial training, we can move closer to a future where humanoid robots become more capable during their lifetime. It could dramatically reduce the time needed to develop new capabilities, which is a key requirement for bringing humanoid robots into industrial environments worldwide.
Read the full technical deep dive.